ver 1.3 (2013/04/22更新)


パケットプリセット
Commandのポップアップメニューから以下のタイプのパケットのプリセットを選択できます。複数個のサーボを使う場合、IDの部位にあらかじめサーボのID番号をスペースを空けて16進数で入力して下さい。
●ショートorロングパケット:
目標位置,移動時間,最大トルク,トルクON,トルクOFF,トルクブレーキ,サーボIDを変更,回転方向(正),回転方向(逆),回転リミット,通信速度9600bps,通信速度14400bps,通信速度19200bps,通信速度28800bps,通信速度38400bps,通信速度57600bps,通信速度76800bps,通信速度115200bps,通信速度153600bps,通信速度230400bps,返信ディレイ時間,ROM書き込み,サーボを再起動,ROM書き込み+サーボを再起動,工場出荷時に戻す
●リターン用のショートパケット:
ROM領域,RAM領域,モデル番号,ファームバージョン,サーボID,リバース,通信速度,返信遅延時間,右リミット角,左リミット角,温度リミット,指示位置,指示時間,最大トルク,トルクON/OFF,現在位置,現在時間,現在スピード,現在負荷,現在温度,現在電圧
RS30xPacketUtilは、双葉電子工業のRS30xシリーズのコマンド式サーボモータを制御するパケット(コマンド)の生成、そして、そのパケットの送信および受信ができるアプリケーションです。
ダウンロード
RS30xPacketUtilを以下のリンクをクリックするとダウンロードできます。ダウンロードしたファイルは圧縮されています。適当な所に解凍してお使い下さい。
-
•Macintosh版 (v1.3: OS X Lion対応)
-
•Windows版 (v1.3)

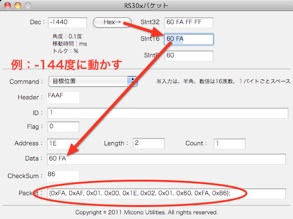
「例:-144度に動かすパケットを作る」
-
1.Command:「目標位置」を選択
-
2.角度は0.1度単位なので-1440をDecに入力
-
3.Hexボタンをクリック
-
4.SInt16の値をDataにペースト
-
5.最下部の赤丸に-144度に動かす為のPacketが出来上がる
一部、パケットの送信に対応しています。USB-TTLコンバータでパソコンとサーボを繋いで行って下さい。

-
1.サーボが繋がっているシリアルポートを選択
-
2.通信速度を選択
-
3.Connectボタンをクリック
-
10.トルクをONにする
-
11.スライダーを動かすと、サーボが動きます
-
 ROMに関する内容の変更を行った場合、変更後Write to ROM(6番)を行わないと変更内容は保存されません。
ROMに関する内容の変更を行った場合、変更後Write to ROM(6番)を行わないと変更内容は保存されません。 -
Free Packetにパケットを書込みSendボタンで送信できます。サーボID、チェックサムは自動で再計算されます。
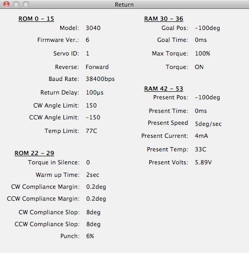
パソコンとサーボをデータの受送信可能な接続を行うことで、データの受信が可能になります。

-
12.要求するメモリーの範囲を選択して、Requestボタンをクリックして下さい。
データが取得できると、以下の様なウインドウが開き取得したデータが表示されます。 -