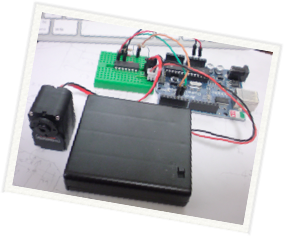
Arduinoでロボゼロのサーボを動かしてみよう!


【目次】
-
◦パケットについて
-
◦トルクON/OFF、回転の為のパケット
-
◦通信速度変更のパケット
-
◦ROM書込みとサーボのリスタートについて
-
◦回転角度や速度の設定
-
◦チェックサムの計算
-
◦情報要求のパケットとリターンパケットについて
-
◦半2重の回路について
-
◦モデル番号、現在の電圧などの値を取得してみた
-
◦サーボIDの変更とROMへの書込みについて
-
◦通信速度変更スケッチの改良版
-
◦ロングパケットについて
(更新 2011/4/22 まだまだ継続中!)